Firstly we will briefly discuss the learning outcomes for the HCI 2 module and then provide a conclusion of our overall process which will show how the learning outcomes were satisfied. By all means this is not a comprehensive list of all our posts, so please take this into consideration.
Learning outcome 1: Explain and discuss practical and theoretical aspects of Human-Computer Interaction.
During the lifecycle of the project, we discussed both the theoretical aspects of HCI and its practicality which can be found here. We analyzed the theoretical aspects of creating persona's, conducting scenarios and designing prototypes as well as providing a mindmap for our target group.
Our case studies involved evaluating robotic component technology, to assess its suitability for integration into the Robot Teaching Assistant, which is the technology that is aimed at children.
We also considered factors such as ethics from attending Russell's lectures.
For more posts which satisfy this criteria, please see our conclusion below (after the learning outcomes)
Learning outcome 2: Apply HCI principles to practical problems.
Throughout the course of the project, we successfully applied the User-Centered Design process which is described in the conclusion below. To summaries, this involved creating persona's, scenarios, prototypes, questionnaires and a range of evaluation techniques.
For further reading which satisfies this criteria, please see our conclusion below (after the learning outcomes)
Learning outcome 3: Participate in analysis and design work in HCI.
We have fulfilled this criteria which is evident in our conclusion below.
Our Conclusion
The blog was created to comply with the Human Computer Interaction II module at the School of Computer Science. During the lifecycle of the project, our aim was to produce a new innovative tool that would help in assisting children at school, by going through the User-Centered Design process. This involved a continuous feedback loop which kept going back to the user – the persona's – (Serena, Ben, Tom, Jason).
We firstly began by forming a mind-map of the under 11 age group, this helped us to see what perceptions the group had for the under 11 age group. Furthermore, we then conducted a brainstorming session, in which the group suggested various ideas and were filtered over two stages. We then created a number of persona's a variety of children in our target audience (Under 11) to aid in the process of finalizing our prospective idea. During the persona stage, it was decided that two of the persona's were to be real and two to be imaginary to ensure that the process was applicable in the real world.
After the persona's, we then finalized our final idea which was the Robot Teaching Assistant. We decided that this was the most innovative and interactive of the ideas suggested, and furthermore, taking into account the rate of technology adoption in the educational sector, the project provided motivation. We carried out an analysis of the market. At this point we were faced with a major design decision, whether the teaching assistant should have a humanoid or robotic appearance.
After this, we then derived the requirements from analyzing the persona's. We began to develop scenarios in order to aid in the development process. The scenarios involved the persona's and observing their current educational environment in order to gain knowledge on how the Robot Teaching Assistant would interact in those environments.
Throughout the process, a number of case studies were conducted which researched into current robotic technologies and components that can be used in our prototype. This enabled us to create the creative design (and more designs here) of the teaching assistant based on the initial requirements gathered from analyzing the persona's. The creative design was important as it allowed us to create an initial prototype based on the needs of the persona's from assessing both the scenarios and persona's. Through discussion and evaluation of the requirements at the creative design stage, the first prototype was created named Miss Dawson. After the prototype was developed, testing and evaluation was conducted on these components:
- Video / Visual
- Audio
- Picture Quality
The next stage of our evaluation was to put the prototype in the scenarios described previousely to observe how the first prototype interacted with the persona's in the scenario using questionnaires. After the testing and evaluation on the prototype, we carried out a critical appraisal of the prototype which led to refinements (part of the redesign stage) being made in our redesign called iBot.
The redesign reflected the issues that were raised in the testing / evaluation of the first prototype based upon the persona's reactions in the scenarios. To assess the redesign, a number of evaluation techniques were considered. From this, we selected the heuristic evaluation and cooperative evaluation. The cooperative evaluation allowed the persona's to raise questions about iBot to the designers and allowed us to observe the persona's interactions with the iBot. The heuristic evaluation involved assessing iBot against a number heuristics. Furthermore, from our evaluations, we conducted a further assessment of any further refinements based upon the evaluations conducted in the previous stage.
To conclude we managed to create “iBot” using the user-centered design approach. As a group, we feel that we have fulfilled this to an extent, however, there are criticisms. During the project, we did make a number of assumptions, for example, that AI technology was so advanced that it could detect human emotions and that some of the components discussed in our cases were readily available. In relation to the User-Centered Design process, we felt that if we had a bit more time we could have conducted further investigations regarding the end user, which would aid in helping us understand more the needs of our target group. We have followed the user centered design process and feel that the process conducted has resulted in a technology being developed that our target group will use.
Thursday, 29 March 2007
Tuesday, 20 March 2007
iBot’s Ethical Dilemma
When designing the Robot Teaching Assistant there were a number of ethical issues raised. After yesterdays lecture, Russell discussed ethical issues that as Computer Scientists we face when designing systems.
In relation to our Robot Teaching Assistant, we felt it was important to highlight the ethical issues associated with robots.
In a recent report on BBC News (http://news.bbc.co.uk/1/hi/technology/6432307.stm), South Korean scientists have begun drawing up an ethical code to protect robots from being abused by humans and vice versa.
This ethical code is based on three laws set by Isaac Asimov: -
- A robot may not injure a human being, or, through inaction, allow a human being to come to harm
- A robot must obey the orders given it by human beings except where such orders would conflict with the First Law
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law
A similar set of principles was also popularized in the iRobot movie starring Will Smith.
One of the key assumptions that we are making in our overall design is that the Robot Teaching Assistant follows these principles. In making this assumption, we should also appreciate the problems associated with this such as iBot having the ability to recognize humans from other similar looking things such as "...chimpanzees, statues and humanoid robots" (BBC News (2007), see URL above).
Another issue, which is important to highlight is the Robot Teaching Assistant’s ability to access the School Database. This raises issues regarding Data Protection, and whether or not, iBot should be allowed to access the children’s information and medical records. We could counter this argument and assert that iBot should be seen as a member of staff at the school, and not an outside entity.
In relation to our Robot Teaching Assistant, we felt it was important to highlight the ethical issues associated with robots.
In a recent report on BBC News (http://news.bbc.co.uk/1/hi/technology/6432307.stm), South Korean scientists have begun drawing up an ethical code to protect robots from being abused by humans and vice versa.
This ethical code is based on three laws set by Isaac Asimov: -
- A robot may not injure a human being, or, through inaction, allow a human being to come to harm
- A robot must obey the orders given it by human beings except where such orders would conflict with the First Law
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law
A similar set of principles was also popularized in the iRobot movie starring Will Smith.
One of the key assumptions that we are making in our overall design is that the Robot Teaching Assistant follows these principles. In making this assumption, we should also appreciate the problems associated with this such as iBot having the ability to recognize humans from other similar looking things such as "...chimpanzees, statues and humanoid robots" (BBC News (2007), see URL above).
Another issue, which is important to highlight is the Robot Teaching Assistant’s ability to access the School Database. This raises issues regarding Data Protection, and whether or not, iBot should be allowed to access the children’s information and medical records. We could counter this argument and assert that iBot should be seen as a member of staff at the school, and not an outside entity.
Monday, 19 March 2007
Case Study: CBBC Survey
Today I came across an interesting survey conducted by CBBC that questioned a number of children regarding technology that they think would be implemented in schools in 15 years time. Many children believe that robots will be serving their dinners and eye scans will replace registers.
This survey illustrates that children are embracing technology in the educational environment and the concept of a teaching assistant is feasible.
Source
This survey illustrates that children are embracing technology in the educational environment and the concept of a teaching assistant is feasible.
Source
Tuesday, 13 March 2007
Further Refinements
In today’s meeting we analyzed the results from the evaluations and identified the areas that need to be improved in the prototype.
1.iBot should be more interactive in terms of helping children even when help has not been requested
This issue was raised in the cooperative evaluation when Tom commented about the lack of assistance from iBot. This refinement involves iBot offering assistance when it senses a child is in distress.
2.iBot should support different languages in order to cater to different children’s needs and to teach foreign languages
Multi language support is a refinement that is vital taking into account multi cultural societies, furthermore, this would allows iBot to teach foreign languages. Furthermore Serena highlighted this issue when iBot was unable to read a French sentence.
3.iBot should have ability to download tutorials which further expands its knowledgebase
This issue was raised by Serena during the cooperative evaluation stage. She requested that iBot help her in playing her violin and iBot responded in that it was unable to play the istrument. Under this refinement, if a student asks iBot regarding a specific subject area and iBot has no prior knowledge, iBot can download new tutorials from the iBot online knowledgebase
4.iBot should synchronize with other iBots to share information / knowledge
This refinement would allows the iBot in question to expands its knowledge base by synchronising with other iBots. The knowledge base consists of experience that the iBot has not been in, for example, a new situation.
5.iBot needs better synchronization with the school timetable database
This issue was raised by Ben during the cooperative evaluation, as iBot had no knowledge about next weeks timetable.
6.Online interface to iBot through instant messaging services. Will allow children to communicate with iBot at home
This refinement is taking into account the Internet society in which we live in, for example, Ben is a member of many social networks. This refinement can also have an educational benefit in the sense that children can learn from iBot through the online interface, for example, ask questions regarding homework.
1.iBot should be more interactive in terms of helping children even when help has not been requested
This issue was raised in the cooperative evaluation when Tom commented about the lack of assistance from iBot. This refinement involves iBot offering assistance when it senses a child is in distress.
2.iBot should support different languages in order to cater to different children’s needs and to teach foreign languages
Multi language support is a refinement that is vital taking into account multi cultural societies, furthermore, this would allows iBot to teach foreign languages. Furthermore Serena highlighted this issue when iBot was unable to read a French sentence.
3.iBot should have ability to download tutorials which further expands its knowledgebase
This issue was raised by Serena during the cooperative evaluation stage. She requested that iBot help her in playing her violin and iBot responded in that it was unable to play the istrument. Under this refinement, if a student asks iBot regarding a specific subject area and iBot has no prior knowledge, iBot can download new tutorials from the iBot online knowledgebase
4.iBot should synchronize with other iBots to share information / knowledge
This refinement would allows the iBot in question to expands its knowledge base by synchronising with other iBots. The knowledge base consists of experience that the iBot has not been in, for example, a new situation.
5.iBot needs better synchronization with the school timetable database
This issue was raised by Ben during the cooperative evaluation, as iBot had no knowledge about next weeks timetable.
6.Online interface to iBot through instant messaging services. Will allow children to communicate with iBot at home
This refinement is taking into account the Internet society in which we live in, for example, Ben is a member of many social networks. This refinement can also have an educational benefit in the sense that children can learn from iBot through the online interface, for example, ask questions regarding homework.
Thursday, 8 March 2007
Heuristic Evaluation
This heuristic evaluation is based on the scenario where children are playing outside in the playground with iBot.
Feedback:
iBot can give information and feedback to the children.
Scenario: iBot tracked the score of the rounders game and informed the children.
Everyday Language:
Currently iBot can only speak English. In the future, iBot will be capable of using multiple languages. In order to do this, iBot would be able to download languages when required. This would allow iBot to help children learning other languages, or communicate with a child who speaks a different language.
Scenario: When a child communicates in a different language iBot can respond.
Undo:
iBot doesn't malfunction when a minor accident occurs.
Scenario: If a rounders ball hit iBot, it would continue playing.
Consistency:
Sometimes iBot performs actions that are unpredictable. Therefore, improvements must be made so that iBot can perform consistently. In the future iBot will respond in similar ways to children’s actions.
Scenario: If a child hit the ball up in the air iBot would try and catch it.
Recognition not Recall:
As mentioned above, iBot is not consistent all of the time making it difficult for children to predict its actions. Children should be able to familiarise themselves with it's behaviour and predict its actions. The children would be able to predict iBot’s behaviour and actions in the same way as they would predict their teacher’s.
Scenario: If iBot caught a ball the child could expect iBot to catch the next ball thrown.
Simple Design:
iBot’s appearance is now robotic and available in several colours.
Scenario: The children were very enthusiastic about the robotic appearance of iBot and found it much more interesting than its previous appearance.
Expert Use:
Teachers in control of iBot are able to assign new tasks to iBot’s schedule, which then can be used in children’s lessons.
Scenario: A teacher can set iBot a new task like playing hide and seek in the playground.
Error Recovery:
iBot has an in-built recovery system to handle serious malfunctions. First the teacher is notified and then iBot connects to its server and attempts to repair itself.
Scenario: If iBot fell over while running to a base, iBot can get back up.
Documentation:
Only part of the required documentation is currently available to the teacher, but in the future detailed online documentation will be available.
Scenario: N/A
Other:
In the future children would be able to communicate with iBot after school hours, while iBot is charging. An instant messenger service could be used to enable this communication.
Farhad Bahramy
Matthew Walker
Feedback:
iBot can give information and feedback to the children.
Scenario: iBot tracked the score of the rounders game and informed the children.
Everyday Language:
Currently iBot can only speak English. In the future, iBot will be capable of using multiple languages. In order to do this, iBot would be able to download languages when required. This would allow iBot to help children learning other languages, or communicate with a child who speaks a different language.
Scenario: When a child communicates in a different language iBot can respond.
Undo:
iBot doesn't malfunction when a minor accident occurs.
Scenario: If a rounders ball hit iBot, it would continue playing.
Consistency:
Sometimes iBot performs actions that are unpredictable. Therefore, improvements must be made so that iBot can perform consistently. In the future iBot will respond in similar ways to children’s actions.
Scenario: If a child hit the ball up in the air iBot would try and catch it.
Recognition not Recall:
As mentioned above, iBot is not consistent all of the time making it difficult for children to predict its actions. Children should be able to familiarise themselves with it's behaviour and predict its actions. The children would be able to predict iBot’s behaviour and actions in the same way as they would predict their teacher’s.
Scenario: If iBot caught a ball the child could expect iBot to catch the next ball thrown.
Simple Design:
iBot’s appearance is now robotic and available in several colours.
Scenario: The children were very enthusiastic about the robotic appearance of iBot and found it much more interesting than its previous appearance.
Expert Use:
Teachers in control of iBot are able to assign new tasks to iBot’s schedule, which then can be used in children’s lessons.
Scenario: A teacher can set iBot a new task like playing hide and seek in the playground.
Error Recovery:
iBot has an in-built recovery system to handle serious malfunctions. First the teacher is notified and then iBot connects to its server and attempts to repair itself.
Scenario: If iBot fell over while running to a base, iBot can get back up.
Documentation:
Only part of the required documentation is currently available to the teacher, but in the future detailed online documentation will be available.
Scenario: N/A
Other:
In the future children would be able to communicate with iBot after school hours, while iBot is charging. An instant messenger service could be used to enable this communication.
Farhad Bahramy
Matthew Walker
Cooperative evaluation
On making our refinements we have decided to evaluate our new design using a cooperative evaluation method in collaboration with our personas. We conducted out cooperative evaluation in an individual environment with our target age group of 5 to 9.J
This individual environment is similar to that constructed during the scenario phase the project (Posted: http://hcigroup2007.blogspot.com/2007/02/scenarios.html)
Interacting in an individual environment
During the process, we observed the personas interact with iBot to see how they would react to the Teaching Assistant.
Personas: -
Serena Sondhi
Ben Manvir
Jason Powers
Tom Green
Summary of interaction
Serena seemed excited when being introduced to the iBot in her reading tutorial. She was eager to read to the iBot to impress the iBot and to see how the robot would rate her reading skills. This attitude seems to be in contrast to our initial humanoid design, which did not receive this desired response.
Her reading tutorial, however, did make her late for her next lesson. This raised concerns regarding iBot’s synchronisation with the local school database timetable.
Ben thought it would be a good feature if he could communicate with iBot outside school hours via instant messenger.
Tom raised issues regarding iBot’s interactivity in relation to help/support.
The following questions were raised to us: -
1. Serena asked, “There was a part in the book which iBot did not understand because it was written in French. Why is this?”
We have noted this concern as iBot only supports the English language.
2. Jason asked, “Why doesn’t the iBot move its mouth when it is talking?”
At this point of time, there is a speaker inside iBot’s mouth, which outputs the sound. This issue was not raised in the previous prototype design, as it was humanoid robot.
3. Tom asked, “Why didn’t iBot help me when I was struggling through my reading?”
iBot only offers help if the child requests help. This raises issues of interactivity between iBot and its interactions.
4. Ben asked, “Why doesn’t iBot wear clothes?”
iBot’s outer shell is its main form of clothing. We questioned Ben further; he compared the iBot to Miss Dawson (the original prototype design which had clothing).
The following questions were raised to iBot: -
1. Ben asked, “What are we doing next week?”
iBot replied that information was not available at this time. This raises issues regarding iBot’s access to future scheduling information.
2. Ben asked, “Are you on Hi5 or Bebo?”
iBot questioned what Hi5 and Bebo was.
This illustrates the enthusiasm the personas had for iBot outside school hours.
3. Serena asked, “Can you help me with playing my violin?”
iBot replied that it was unable to play the violin. This issue was similar to the issue raised by Ben which relates to information / data download.
4. Tom asked, “Do you have any iBot friends?”
iBot replied no. This raised issues regarding synchronisation with other iBots to gain information in any environment.
Conclusion
From this cooperative evaluation a number of issues have been raised: -
- iBot should be more interactive in terms of helping children even when help has not been requested
- iBot should support different languages in order to cater to different children’s needs and to teach foreign languages.
- iBot should download lessons / tutorials which further expands its knowledgebase.
- iBot should synchronise with other iBots to share information / knowledge.
- iBot needs better synchronisation with the school timetable database
- Online interface to iBot through instant messaging services. Will allow children to communicate with iBot at home.
Gaurav Chander
Bobby Biran Singh
This individual environment is similar to that constructed during the scenario phase the project (Posted: http://hcigroup2007.blogspot.com/2007/02/scenarios.html)
Interacting in an individual environment
During the process, we observed the personas interact with iBot to see how they would react to the Teaching Assistant.
Personas: -
Serena Sondhi
Ben Manvir
Jason Powers
Tom Green
Summary of interaction
Serena seemed excited when being introduced to the iBot in her reading tutorial. She was eager to read to the iBot to impress the iBot and to see how the robot would rate her reading skills. This attitude seems to be in contrast to our initial humanoid design, which did not receive this desired response.
Her reading tutorial, however, did make her late for her next lesson. This raised concerns regarding iBot’s synchronisation with the local school database timetable.
Ben thought it would be a good feature if he could communicate with iBot outside school hours via instant messenger.
Tom raised issues regarding iBot’s interactivity in relation to help/support.
The following questions were raised to us: -
1. Serena asked, “There was a part in the book which iBot did not understand because it was written in French. Why is this?”
We have noted this concern as iBot only supports the English language.
2. Jason asked, “Why doesn’t the iBot move its mouth when it is talking?”
At this point of time, there is a speaker inside iBot’s mouth, which outputs the sound. This issue was not raised in the previous prototype design, as it was humanoid robot.
3. Tom asked, “Why didn’t iBot help me when I was struggling through my reading?”
iBot only offers help if the child requests help. This raises issues of interactivity between iBot and its interactions.
4. Ben asked, “Why doesn’t iBot wear clothes?”
iBot’s outer shell is its main form of clothing. We questioned Ben further; he compared the iBot to Miss Dawson (the original prototype design which had clothing).
The following questions were raised to iBot: -
1. Ben asked, “What are we doing next week?”
iBot replied that information was not available at this time. This raises issues regarding iBot’s access to future scheduling information.
2. Ben asked, “Are you on Hi5 or Bebo?”
iBot questioned what Hi5 and Bebo was.
This illustrates the enthusiasm the personas had for iBot outside school hours.
3. Serena asked, “Can you help me with playing my violin?”
iBot replied that it was unable to play the violin. This issue was similar to the issue raised by Ben which relates to information / data download.
4. Tom asked, “Do you have any iBot friends?”
iBot replied no. This raised issues regarding synchronisation with other iBots to gain information in any environment.
Conclusion
From this cooperative evaluation a number of issues have been raised: -
- iBot should be more interactive in terms of helping children even when help has not been requested
- iBot should support different languages in order to cater to different children’s needs and to teach foreign languages.
- iBot should download lessons / tutorials which further expands its knowledgebase.
- iBot should synchronise with other iBots to share information / knowledge.
- iBot needs better synchronisation with the school timetable database
- Online interface to iBot through instant messaging services. Will allow children to communicate with iBot at home.
Gaurav Chander
Bobby Biran Singh
Evaluation
At this point the refinement will be evaluated using cooperative and heuristic evaluation to discover any further refinements. The evaluations will place the prototype into one of the scenarios developed with a number of personas.
There are many types of evaluation that could have been followed:
Heuristic Evaluation – is an evaluation technique which analyses a product against a set of principles known as heuristics.
We have chosen to use heuristic evaluation due to a number of reasons:
We have chosen to use co-operative e evaluation due to a number of reasons:
Think-Aloud - “is a form of observation where the user is asked to talk through what he is doing as he is being observed; for example, describing what he believes is happening, why he takes an action, what he is trying to do”[2].
Interviews - is a technique used to gather information about the user's thoughts and preferences on particular issues. This technique is not suitable as the children may have difficulty in expressing themselves, hence, invalid results.
[1] Source
[2] Source
There are many types of evaluation that could have been followed:
Heuristic Evaluation – is an evaluation technique which analyses a product against a set of principles known as heuristics.
We have chosen to use heuristic evaluation due to a number of reasons:
- The evaluation can be based upon the personas and applied to the scenarios which is a key component of user-centred design
- The evaluation offers a quick indication into the current state of the system/product
- The evaluation can be conducted early in the development cycle
We have chosen to use co-operative e evaluation due to a number of reasons:
- User involvement at the evaluation stage.
- If any problem arises they can be clarified and solved with the users' help.
Think-Aloud - “is a form of observation where the user is asked to talk through what he is doing as he is being observed; for example, describing what he believes is happening, why he takes an action, what he is trying to do”[2].
Interviews - is a technique used to gather information about the user's thoughts and preferences on particular issues. This technique is not suitable as the children may have difficulty in expressing themselves, hence, invalid results.
[1] Source
[2] Source
Tuesday, 6 March 2007
iBot - Teaching Assistant Refined Design
This is an external shell design of the iBot - Teaching Assistant: -

Please click above for a larger screenshot
This is an internal shell design of the iBot - Teaching Assistant: -
Please click above for a larger screenshot
We began firstly by analysing the responses of our questionnaire put foward to our personas regarding our first design and based on the responses of this we looked at possible refinements to the design of the Teaching Assistant.
Furthermore from this, we will further evaluate the design through using heuristic techniques and cooperative evaluation with the personas.
Component Details:
[1] Touch Sensors
[2] Microphone
[3] Speaker
[4] Camera
[5] Movement
[6] Memory
[7] WiFi
[8] Facial Expression
Please click above for a larger screenshot
This is an internal shell design of the iBot - Teaching Assistant: -
Please click above for a larger screenshot
We began firstly by analysing the responses of our questionnaire put foward to our personas regarding our first design and based on the responses of this we looked at possible refinements to the design of the Teaching Assistant.
Furthermore from this, we will further evaluate the design through using heuristic techniques and cooperative evaluation with the personas.
Component Details:
[1] Touch Sensors
[2] Microphone
[3] Speaker
[4] Camera
[5] Movement
[6] Memory
[7] WiFi
[8] Facial Expression
Saturday, 3 March 2007
Case Study: DaimlerChrysler's Robotic Production Assistants
DaimlerChrysler's have developed a number of autonomous forklift trucks that can navigate freely around an industrial environment. The key feature of the forklifts is that they operate via laser scanning sensors that enable the forklifts to detect objects. This technology has been successfully applied by DaimlerChrysler in a industrial environment, hence, movement and health/safety issues can be resolved by implementing this technology in the teaching assistant.
Source
Source
Thursday, 1 March 2007
Refinement
Refinement Session Photographs:

Please click on the image above for a full sized screenshot
Sensors:
Height:
Network Features:
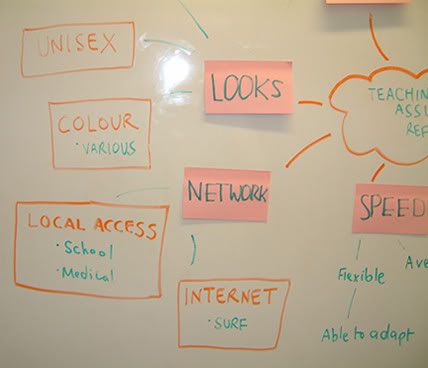
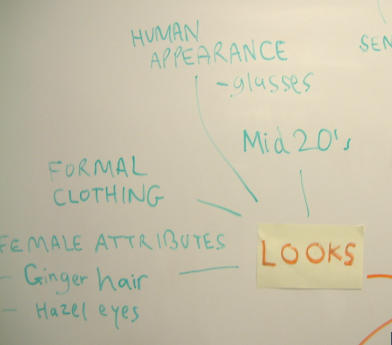
Looks:

Other:

Please click on the image above for a full sized screenshot
Sensors:
Height:
Network Features:
Looks:
Other:
Critical appraisal of prototype
After analysing the questionnaires we have refined the prototype based upon a number of factors.
We took into account that there were some children that were frightened that Miss Dawson looked like a human. From this we have come to the conclusion that the teaching assistant must have a “robotic” appearance otherwise the advantages of being a robot is lost and the children will soon lose interest. For example,
This is a quote from Prof Hiroshi Ishiguro the creator of Repliee Q1Expo, this illustrates that the advantage of being a robot is lost, hence, the adoption of a robotic appearance.
Additionally, we have decided that the teaching assistant should have a unisex design so that the teaching assistant is approachable by both genders. As the appearance is robotic, there is no need for silicon to give the appearance of skin, and the outer shell of the robot will be plastic.
The teaching assistant should also be the same height of an average 5 to 9 age group (110 to 134cm) child; this will make the children more comfortable when approaching the teaching assistant. In terms of looks, when analysing the questionnaires, we have decided that the children will react more favourably to different colours of the teaching assistant. This, we hope, will ease any fears the children have surrounding the robot.
Human Appearance - Miss Dawson
Height: - Average Female Height
Weight: - 70 Kilos
Walking Speed: - 5KM / PH
Running Speed: - 12KM / PH
Operational Time: - 8 hours fully charged
Degrees of Movement: - 40 Degrees of movement
Robot Appearance - iBot (Refinement)
Height: - 110 to 134cm
Weight: - 50 Kilos
Walking Speed: - 5KM / PH
Running Speed: - 12KM / PH
Operational Time: - 8 hours fully charged
Degrees of Movement: - 34 Degrees of movement
Due to the problems identified in the questionnaire results the speech recognition software has been improved and implanted into the teaching assistants ears and included microphones in other areas such as the hands. Furthermore, children did highlight the issue with the teaching assistant being unable to see children from a distance. As a result the internal camera component will be improved to 10 mega-pixels.
To make the teaching assistant appeal to both boys and girls the robot will be unisex and now will be called "iBot".
The next post will contain photos of the refinement session.
We took into account that there were some children that were frightened that Miss Dawson looked like a human. From this we have come to the conclusion that the teaching assistant must have a “robotic” appearance otherwise the advantages of being a robot is lost and the children will soon lose interest. For example,
“We have found that people forget she is an android while interacting with her”
This is a quote from Prof Hiroshi Ishiguro the creator of Repliee Q1Expo, this illustrates that the advantage of being a robot is lost, hence, the adoption of a robotic appearance.
Additionally, we have decided that the teaching assistant should have a unisex design so that the teaching assistant is approachable by both genders. As the appearance is robotic, there is no need for silicon to give the appearance of skin, and the outer shell of the robot will be plastic.
The teaching assistant should also be the same height of an average 5 to 9 age group (110 to 134cm) child; this will make the children more comfortable when approaching the teaching assistant. In terms of looks, when analysing the questionnaires, we have decided that the children will react more favourably to different colours of the teaching assistant. This, we hope, will ease any fears the children have surrounding the robot.
Human Appearance - Miss Dawson
Height: - Average Female Height
Weight: - 70 Kilos
Walking Speed: - 5KM / PH
Running Speed: - 12KM / PH
Operational Time: - 8 hours fully charged
Degrees of Movement: - 40 Degrees of movement
Robot Appearance - iBot (Refinement)
Height: - 110 to 134cm
Weight: - 50 Kilos
Walking Speed: - 5KM / PH
Running Speed: - 12KM / PH
Operational Time: - 8 hours fully charged
Degrees of Movement: - 34 Degrees of movement
Due to the problems identified in the questionnaire results the speech recognition software has been improved and implanted into the teaching assistants ears and included microphones in other areas such as the hands. Furthermore, children did highlight the issue with the teaching assistant being unable to see children from a distance. As a result the internal camera component will be improved to 10 mega-pixels.
To make the teaching assistant appeal to both boys and girls the robot will be unisex and now will be called "iBot".
The next post will contain photos of the refinement session.
Group discussion
Making the design will not only help us of how our robot will work but also give us an in-depth view of how the robot will be used to interact with the children. The practical side to it will show us what our end product will look like, our personas will help us do this and also the group can interact and make recommendations as to what will be needed. Our prototype is made and now we can work on refining it, so that our product meets what the children want.
Thursday, 22 February 2007
Scenario Questionnaire
The following personas will be placed into the group scenario
Serena Sondhi
Ben Manvir
Jason Powers
Tom Green
Did you think Miss Dawson looked like a robot?
Serena -> Yes – I have seen many robots in my father’s films
Ben -> No - Shouldn’t robots have metal bodies and lots of wires?
Jason -> Wasn’t sure – As it sort of moved like a robot
Tom -> No – As I didn’t get close to Miss Dawson due to my wheel chair
Did Miss Dawson frighten you?
Serena -> Was slightly frightened - Miss Dawson’s skin was cold
Ben -> Yes - When I was told by the teacher that Miss Dawson was a robot, I thought how could it have skin?
Jason -> Yes - I was slightly scared because of the way Miss Dawson moved
Tom -> No – I did not have much time to interact with Miss Dawson
Could you understand Miss Dawson?
Serena -> No - As Miss Dawson only could say a few words when we were playing rounders.
Ben -> Yes - her voice was very clear and spoke like a robot Katie on miniclips.com when I was close to her
Jason -> Yes - she spoke very nicely
Tom -> No - when I was a few meters away was unable to hear Miss Dawson
Did Miss Dawson understand you?
Serena -> Only when I said simple thing like “hello” and during the rounders game
Ben -> Not when I shouted for the ball, she only understood when I were close to her
Jason -> When I asked Miss Dawson about what football team she supported she didn’t understand
Tom -> Didn’t get much of a chance to speak to Miss Dawson
Who did you prefer, Miss Dawson or the teachers?
Serena -> The teachers - As Miss Dawson was just a robot in a human body
Ben -> Miss Dawson - because she does not understand anything I say!
Jason -> The teacher - As everybody was around Miss Dawson and when we were playing she could hear what I was saying
Tom -> The teachers - As I received more attention
Do you think Miss Dawson should look more like a robot?
Serena -> No - It may scare me
Ben -> Yes - Like the ones in The Terminator
Jason -> Didn’t matter, as it still is a robot. I’m more concerned about Miss Dawson helping with my studies
Tom -> Yes
Did you find Miss Dawson interesting?
Serena -> No - Didn’t have knowledge about the Egyptians, my favourite topic
Ben -> Yes - first time I have seen a robot in real life. I usually play many games involving robots on the Internet
Jason -> No - Miss Dawson was just a toy and I didn’t take her seriously
Tom -> Yes, I was surprised how realistic Miss Dawson was
Was Miss Dawson able to participate / join in the exercise?
Serena -> Yes - she was very good
Ben -> No - she was too slow at running
Jason -> Made wrong decisions when she was referee
Tom -> She seemed to blend in okay
How do you think Miss Dawson can be improved?
Serena -> Have more knowledge
Ben -> Miss Dawson should be a super robot, which can lift up anything
Jason -> Faster speed and have better hearing
Tom -> Give more attention to children that need it
Bobby Biran Singh
Gaurav Chander
Serena Sondhi
Ben Manvir
Jason Powers
Tom Green
Did you think Miss Dawson looked like a robot?
Serena -> Yes – I have seen many robots in my father’s films
Ben -> No - Shouldn’t robots have metal bodies and lots of wires?
Jason -> Wasn’t sure – As it sort of moved like a robot
Tom -> No – As I didn’t get close to Miss Dawson due to my wheel chair
Did Miss Dawson frighten you?
Serena -> Was slightly frightened - Miss Dawson’s skin was cold
Ben -> Yes - When I was told by the teacher that Miss Dawson was a robot, I thought how could it have skin?
Jason -> Yes - I was slightly scared because of the way Miss Dawson moved
Tom -> No – I did not have much time to interact with Miss Dawson
Could you understand Miss Dawson?
Serena -> No - As Miss Dawson only could say a few words when we were playing rounders.
Ben -> Yes - her voice was very clear and spoke like a robot Katie on miniclips.com when I was close to her
Jason -> Yes - she spoke very nicely
Tom -> No - when I was a few meters away was unable to hear Miss Dawson
Did Miss Dawson understand you?
Serena -> Only when I said simple thing like “hello” and during the rounders game
Ben -> Not when I shouted for the ball, she only understood when I were close to her
Jason -> When I asked Miss Dawson about what football team she supported she didn’t understand
Tom -> Didn’t get much of a chance to speak to Miss Dawson
Who did you prefer, Miss Dawson or the teachers?
Serena -> The teachers - As Miss Dawson was just a robot in a human body
Ben -> Miss Dawson - because she does not understand anything I say!
Jason -> The teacher - As everybody was around Miss Dawson and when we were playing she could hear what I was saying
Tom -> The teachers - As I received more attention
Do you think Miss Dawson should look more like a robot?
Serena -> No - It may scare me
Ben -> Yes - Like the ones in The Terminator
Jason -> Didn’t matter, as it still is a robot. I’m more concerned about Miss Dawson helping with my studies
Tom -> Yes
Did you find Miss Dawson interesting?
Serena -> No - Didn’t have knowledge about the Egyptians, my favourite topic
Ben -> Yes - first time I have seen a robot in real life. I usually play many games involving robots on the Internet
Jason -> No - Miss Dawson was just a toy and I didn’t take her seriously
Tom -> Yes, I was surprised how realistic Miss Dawson was
Was Miss Dawson able to participate / join in the exercise?
Serena -> Yes - she was very good
Ben -> No - she was too slow at running
Jason -> Made wrong decisions when she was referee
Tom -> She seemed to blend in okay
How do you think Miss Dawson can be improved?
Serena -> Have more knowledge
Ben -> Miss Dawson should be a super robot, which can lift up anything
Jason -> Faster speed and have better hearing
Tom -> Give more attention to children that need it
Bobby Biran Singh
Gaurav Chander
Scenario Questionnaire
The following personas will be placed into the individual scenario
Serena Sondhi
Ben Manvir
Jason Powers
Tom Green
Teaching Assistant is called Miss Dawson.
Serena Sondhi
Ben Manvir
Jason Powers
Tom Green
Teaching Assistant is called Miss Dawson.
- Could you understand Miss Dawson?
Ben Manvir: | No | “She talked too quickly”. |
Serena Sondhi: | Yes | “She was a bit slow”. |
Tom Green: | Yes | “Most of the time”. |
Jason Powers: | No | “She talked weird”. |
- Did Miss Dawson understand you?
Ben Manvir: | No | “She didn’t answer my question”. |
Serena Sondhi: | Yes | |
Tom Green: | Yes | |
Jason Powers: | Yes | “Took a long time to answer my question”. |
- Who did you prefer, Miss Dawson or the teacher?
Ben Manvir: | Neither | “I don’t like any of them”. |
Serena Sondhi: | Teacher | |
Tom Green: | Both | “Miss Dawson could help me with other stuff/ reading /playing chess”. |
Jason Powers: | Miss Dawson | It would be wicked if she was our teacher |
- Did you find Miss Dawson interesting?
Ben Manvir: | No | “A robot should look like a robot”. |
Serena Sondhi: | No | (She felt withdrawn from Miss Dawson). |
Tom Green: | Yes | |
Jason Powers: | Yes |
- Was Miss Dawson able to participate / join in the exercise?
Ben Manvir: | No | “She was useless”. |
Serena Sondhi: | Yes | |
Tom Green: | Yes | “She picked out my reading mistakes”. |
Jason Powers: | Yes | “She helped me with my reading”. |
Farhad Bahramy
Matthew Walker
Taiyyib Azam
Testing On Components - Video/Visual Movement
This is a first-person video of the internal camera component within the Robot Teaching Assistant:-
As can be seen, the Robot Teaching Assistant is moving up a set of stairs in the outside environment and recognizing large objects.
The second first-person video shows the teaching assistant tilting its head/view in a vertical direction, showing the sophistication of its operational movement:-
As can be seen, the Robot Teaching Assistant is moving up a set of stairs in the outside environment and recognizing large objects.
The second first-person video shows the teaching assistant tilting its head/view in a vertical direction, showing the sophistication of its operational movement:-
Testing On Components - Picture Quality
Here is a picture of a TV series, “Basil Brush” . Whilst the children were watching the TV, Miss Dawson decided to take a few internal camera shots which shows the picture quality.
When the children went out into the garden to play with Miss Dawson, the robot teaching assistant took some pictures of flowers as the kids were doing some plant growing of their own in class as can be seen in the picture.

When the children went out into the garden to play with Miss Dawson, the robot teaching assistant took some pictures of flowers as the kids were doing some plant growing of their own in class as can be seen in the picture.

Wednesday, 21 February 2007
Testing On Components - Voice / Understanding
We made our persona interact with the teaching assistant, in our co-operative evaluation the children talked with it and the teaching assistant replied.
Here is a downloadable sound file of what was heard: -
Responses from the Robot Teaching Assistant - "I am unable to play the violin"
Here is a downloadable sound file of what was heard: -
Responses from the Robot Teaching Assistant - "I am unable to play the violin"
Testing On Components
We split the body parts up and allowed them to work independent to see if it would be able to handle tasks; the personas got involved and found it a fun and interesting experience. From our requirement we were able to test for the key areas specified. The hand was able to throw a ball in the air and catch it. The hand component was also able to hold the children’s hand with a gentle squeeze. The legs were able to adapt to the children’s pace, on some tests it outran the children.
Here are some of the tests that we ran: - (Some will be documented in the next posts)
Picture of:
- Picture quality
- Video quality
- Feedback from internet
- Color image
- Sensing heat
Video:
- Video quality
- Walking
Tuesday, 20 February 2007
Prototyping Design
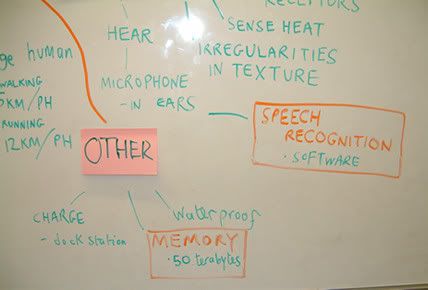
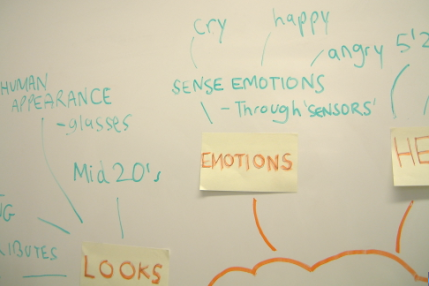
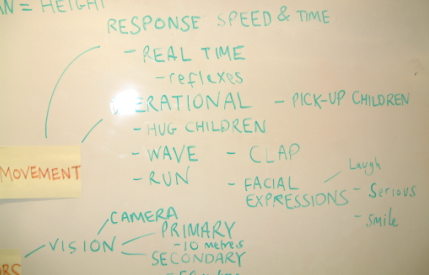
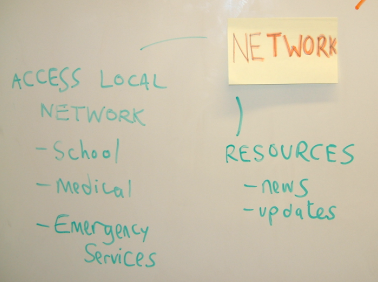
The group met today to finalize the prototype for our teaching assistant. From analyzing our persona's and scenarios, we formulated our design for the Teaching Assistant: -
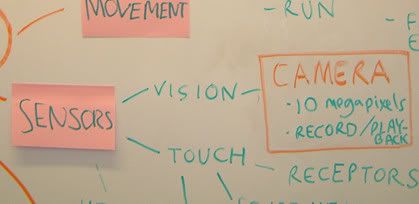
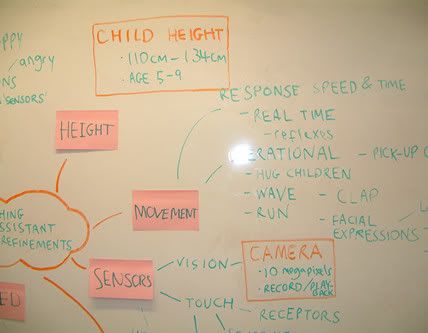
We primarily focused our efforts on 7 key areas, such as Emotions, Height, Movement, Sensors, Speed, Looks/Appearance and Network: -
In terms of Sensors, we analyzed different areas such as vision, touch and hearing. : -
Emotions: -
Movement: -
Network, the Teaching Assistant will have an in-built wireless fidelity card which allows the robot to access local educational network and emergency services: -
As already been stated the teaching assistant will adopt a female look.
Speed - It was important to consider the relative speed the robot will have compared to children. It should be possible that the Robot matches the same motorized speed as that of the walking speed of a child.: -
Other - In this section we detailed any extra functionality of the Teaching Assistant: -
In terms of the Teaching Assistant being waterproof, the robot will have a waterproof fabric laminated onto its 'skin', thereby reducing the risk water may have on the robot.
Furthermore, from this prototyping session, we will be able to draw conceptual designs of the robot.

Please click on the image for a full sized screenshot
We primarily focused our efforts on 7 key areas, such as Emotions, Height, Movement, Sensors, Speed, Looks/Appearance and Network: -

In terms of Sensors, we analyzed different areas such as vision, touch and hearing. : -

Emotions: -
Movement: -
Network, the Teaching Assistant will have an in-built wireless fidelity card which allows the robot to access local educational network and emergency services: -
As already been stated the teaching assistant will adopt a female look.
Speed - It was important to consider the relative speed the robot will have compared to children. It should be possible that the Robot matches the same motorized speed as that of the walking speed of a child.: -

Other - In this section we detailed any extra functionality of the Teaching Assistant: -
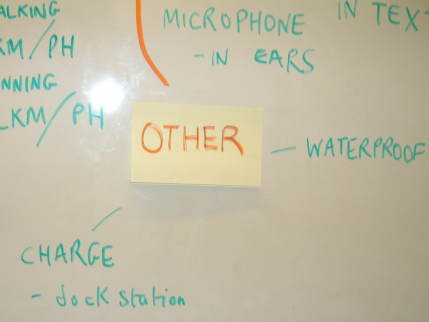
In terms of the Teaching Assistant being waterproof, the robot will have a waterproof fabric laminated onto its 'skin', thereby reducing the risk water may have on the robot.
Furthermore, from this prototyping session, we will be able to draw conceptual designs of the robot.
Case Study: Waseda Talker No.6
Speech is a very important factor taking into account the environment, the teaching
assistant must be able to express itself in a clear and appropriate manner. The language used must be simplified in order for the children to understand what the teaching assistant is saying. There are a number of robots that offer this functionality, for example, the Waseda Talker No.6 consists of lungs, vocal cords, a tongue, lips and other components to offer speech. The robot can adjust is pitch taking into account the situation, for example, can whisper and shout.
This technology can be incorporated into the teaching assistant to deliver the speech
functionality.

Source
assistant must be able to express itself in a clear and appropriate manner. The language used must be simplified in order for the children to understand what the teaching assistant is saying. There are a number of robots that offer this functionality, for example, the Waseda Talker No.6 consists of lungs, vocal cords, a tongue, lips and other components to offer speech. The robot can adjust is pitch taking into account the situation, for example, can whisper and shout.
This technology can be incorporated into the teaching assistant to deliver the speech
functionality.

Source
HCI Theory & Practice - Prototyping
At this stage of the project, we will now analyse “prototyping” and its practicality in our user-centered design project.
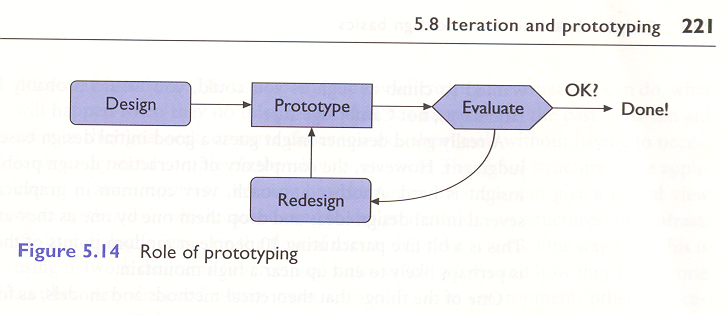
Image Reference: (Beale et al, Human-Computer Interaction, 2004) Figure 5.14
Please click above for a larger screenshot
In our last meeting, Russell discussed with us the purpose of the prototype in the overall design of the project. On the Human Computer Interaction module homepage, there is an interesting report which analyses the role prototyping has in developing systems: -
“Prototyping is increasingly used as a vehicle for developing and demonstrating visions of innovative systems.”
(Baumer et al. 1996)
We feel this quote really reflects the aim of the concept of prototyping. When analysing prototyping in the context of User-Centered Design, it really provides the opportunity for designers to use the accumulation of knowledge derived from analysing persona's and scenarios, hence, prototyping is a key component in the User-Centered Design.
However, there are pitfalls to prototyping, as the method very much follows a hill-climbing approach. If our initial prototype design concept is bad, after refinement, we may end up with a final design that is simply a more cleaned up version of the initial prototype design. Therefore it is important that after the prototype design, we evaluate our findings against our persona's, using techniques such as scenario questionnaires and a further critical appraisal based around the results of our findings.
It is important that any issues raised during the evaluation of our initial prototype will help us in understanding what is wrong and how we can improve the prototype from this starting point. Only then we can avoid a situation described earlier regarding the problem with the high climbing approach in prototyping.
Image Reference: (Beale et al, Human-Computer Interaction, 2004) Figure 5.14
Please click above for a larger screenshot
In our last meeting, Russell discussed with us the purpose of the prototype in the overall design of the project. On the Human Computer Interaction module homepage, there is an interesting report which analyses the role prototyping has in developing systems: -
“Prototyping is increasingly used as a vehicle for developing and demonstrating visions of innovative systems.”
(Baumer et al. 1996)
We feel this quote really reflects the aim of the concept of prototyping. When analysing prototyping in the context of User-Centered Design, it really provides the opportunity for designers to use the accumulation of knowledge derived from analysing persona's and scenarios, hence, prototyping is a key component in the User-Centered Design.
However, there are pitfalls to prototyping, as the method very much follows a hill-climbing approach. If our initial prototype design concept is bad, after refinement, we may end up with a final design that is simply a more cleaned up version of the initial prototype design. Therefore it is important that after the prototype design, we evaluate our findings against our persona's, using techniques such as scenario questionnaires and a further critical appraisal based around the results of our findings.
It is important that any issues raised during the evaluation of our initial prototype will help us in understanding what is wrong and how we can improve the prototype from this starting point. Only then we can avoid a situation described earlier regarding the problem with the high climbing approach in prototyping.
Monday, 19 February 2007
Creative Design - Final
This is our creative design. After putting our initial requirements together, derived from the personas, we came up with Miss Dawson.
Please click below for a larger screenshot: -

Sunday, 18 February 2007
Case Study: HRP-2
Hearing is another important factor for the teaching assistant, which is further complicated taking into account children voices and possibly a noisy environment.
Research has found a Japanese robot called HRP-2 that can understand human speech using a number of microphones placed in the robots head. Furthermore, sophisticated speech recognition software is implemented to offer a high degree of functionality.
This robot demonstrates that the technology for advanced speech recognition is to some degree developed.

Source
Research has found a Japanese robot called HRP-2 that can understand human speech using a number of microphones placed in the robots head. Furthermore, sophisticated speech recognition software is implemented to offer a high degree of functionality.
This robot demonstrates that the technology for advanced speech recognition is to some degree developed.

Source
Case Study: AUC Robot Camera Head
After research into current robots sensors and camera technology a article was found discussing the AUC robot camera head. Eye movements can be performed at 100 degrees a second with its neck being able to move at 100 degrees a second. In terms of technology this robot is created from standard components, hence, the use of advanced technology can assist in reducing the size of the eyes resulting in the camera being more suitable for the teaching assistant. The speed of movement is a key factor taking into account the environment the teaching assistant will operate in.

Source

Source
Creative Design - Drawing / Mock Up
Before beginning the prototype, we have created a mock-up of the design of our humanoid robot in the creative design stage: -
Female Humanoid Appearance: -
Female Humanoid Appearance: -
Friday, 16 February 2007
Case Study: NASA: Touch Sensor for Robots
Whilst researching into sensor technology the NASA robot hands project was discovered. A robot hand has been developed by NASA which is able to derive information about objects it has grasped, for example, its shape.
This technology emphasizes that the teaching assistant could have very sensitive touch capabilities which are required in this environment.
Source
This technology emphasizes that the teaching assistant could have very sensitive touch capabilities which are required in this environment.
Source
Thursday, 15 February 2007
Case Study: Repliee Q1Expo
After research into humanoids Repliee Q1Expo was disocerve, Repliee Q1Expois a female android created by Japanese scientists and is the most human looking android ever to be created. Repliee Q1Expo has flexible silicone for skin and a number of sensors and motors to allow it to turn and react in a human like manner.
This android illustrates that the appearance of a human can be replicated to some degree via a mixture of sensors and silicon skin.

Source:
This android illustrates that the appearance of a human can be replicated to some degree via a mixture of sensors and silicon skin.

Source:
Tuesday, 13 February 2007
Scenario - interaction in a group
What is the age group?
The age group based in this scenario is the 5 to 9 age group. The gender of the group is equally balanced. There are 15 children in the group.
Which environment are we in (Inside / Outside / Classroom / Hall)?
Children are currently having a physical education lesson on the lower school playground. The day is currently sunny and the children have bought there water bottles with them.
What is the layout of the environment?

Source: http://www.croydon-p.schools.nsw.edu.au/images/LOGOS/layo2.jpg Date Accessed: 13th February 2007
The children are exercising at the Young Street play area at the right of Block 1. Around the boundary of the play area, there are large oak trees and wooden fences.
The play area is divided in two sections, one being concrete and one being grass. There is also a small sandpit that the children will be using for long jumps.
On the concrete there is a snakes & ladders paint outline and hopscotch area.
How many teachers are there in the area?
On average there are two teachers and two supervisors.
What are they currently learning?
The children are learning how to warm up – stretching and a light jog in preparation for a game of rounders. It is the first time the children have played rounders at school and the first 15 minutes will be used to show the children how to play the game.
What are the children’s attitudes?
The children enjoy the physical education lessons and are enthusiastic about playing rounders. Some children, however, have complained that its too hot.
What’s the time of day?
10:40am, although there was a delay of ten minutes.
What are the current teaching methods?
Involves supervisor demonstrating how to do warm-ups and the children practising in front of the teachers. Before the lesson, a small video is played in class to demonstrate some of the activities the children will be carrying out.
In this scenario how would the robot-teaching assistant interact with the children?
- The teaching assistant can demonstrate how to exercise and the children mimic this in a group
- Offer children help if they are confused about the rules
- During the game of rounders, the teaching assistant will be the referee
- Teaching assistant can participate in the game of rounders

Source: http://world.honda.com/HDTV/ASIMO/New-ASIMO-exercising/
Date Accessed: 13th February 2007

Source: http://world.honda.com/HDTV/ASIMO/New-ASIMO-exercising/
Date Accessed: 13th February 2007
In this scenario how would the children interact with the teaching assistant?
- Children may well be more interested in the teaching assistant than the physical education lesson itself
- The children may want to be the teaching assistant’s buddy/friend and may surrounded him
- There may well be some children that will be scared of the teaching assistant
Gaurav Chander
Bobby Biran Singh
The age group based in this scenario is the 5 to 9 age group. The gender of the group is equally balanced. There are 15 children in the group.
Which environment are we in (Inside / Outside / Classroom / Hall)?
Children are currently having a physical education lesson on the lower school playground. The day is currently sunny and the children have bought there water bottles with them.
What is the layout of the environment?
Source: http://www.croydon-p.schools.nsw.edu.au/images/LOGOS/layo2.jpg Date Accessed: 13th February 2007
The children are exercising at the Young Street play area at the right of Block 1. Around the boundary of the play area, there are large oak trees and wooden fences.
The play area is divided in two sections, one being concrete and one being grass. There is also a small sandpit that the children will be using for long jumps.
On the concrete there is a snakes & ladders paint outline and hopscotch area.
How many teachers are there in the area?
On average there are two teachers and two supervisors.
What are they currently learning?
The children are learning how to warm up – stretching and a light jog in preparation for a game of rounders. It is the first time the children have played rounders at school and the first 15 minutes will be used to show the children how to play the game.
What are the children’s attitudes?
The children enjoy the physical education lessons and are enthusiastic about playing rounders. Some children, however, have complained that its too hot.
What’s the time of day?
10:40am, although there was a delay of ten minutes.
What are the current teaching methods?
Involves supervisor demonstrating how to do warm-ups and the children practising in front of the teachers. Before the lesson, a small video is played in class to demonstrate some of the activities the children will be carrying out.
In this scenario how would the robot-teaching assistant interact with the children?
- The teaching assistant can demonstrate how to exercise and the children mimic this in a group
- Offer children help if they are confused about the rules
- During the game of rounders, the teaching assistant will be the referee
- Teaching assistant can participate in the game of rounders
Source: http://world.honda.com/HDTV/ASIMO/New-ASIMO-exercising/
Date Accessed: 13th February 2007
Source: http://world.honda.com/HDTV/ASIMO/New-ASIMO-exercising/
Date Accessed: 13th February 2007
In this scenario how would the children interact with the teaching assistant?
- Children may well be more interested in the teaching assistant than the physical education lesson itself
- The children may want to be the teaching assistant’s buddy/friend and may surrounded him
- There may well be some children that will be scared of the teaching assistant
Gaurav Chander
Bobby Biran Singh
Scenarios - interaction with an individual
What is the age group?
Aged 5 to 9
Which environment are we in (Inside / Outside / Classroom / Hall)?
Inside – in classroom a small room near the head’s office where there is a bookcase for which the child chooses a book to read
What is the layout of the environment?
Small room maximum for 4 people with chairs and one desk and a couple of shelves where there are educational books and some posters.
How many teachers are there in the classroom?
1 teacher who listens to the child read
How many children are there?
1 currently reading and 3 listeners
What are they currently learning?
Reading skills and communication skills
The children’s attitudes?
May feel nervous, as they don’t know what to expect
What is the time of day?
After lunch. 2:00PM
What are the current teaching methods (IT)?
Teacher is there to help the child through any difficulties. No use of technology.
In this scenario how would the teaching assistant interact with the children?
- Interact with child by pronouncing difficult words
- Save time by listening to another child
- Act out a certain scene from a book
- More accurate speech would help less fortunate children / learning difficulties
- Help children understand grammar in terms of reading
Based on this, how would the children interact with teaching assistant?
- Would find it interesting
- Learned how to improve speech
- Found it a new fun way to learn
- New friend – someone to talk to about bullying
- Less pressure
- Read of the face where the book is played for the child after he has read, so that he can review
Aged 5 to 9
Which environment are we in (Inside / Outside / Classroom / Hall)?
Inside – in classroom a small room near the head’s office where there is a bookcase for which the child chooses a book to read
What is the layout of the environment?
Small room maximum for 4 people with chairs and one desk and a couple of shelves where there are educational books and some posters.
How many teachers are there in the classroom?
1 teacher who listens to the child read
How many children are there?
1 currently reading and 3 listeners
What are they currently learning?
Reading skills and communication skills
The children’s attitudes?
May feel nervous, as they don’t know what to expect
What is the time of day?
After lunch. 2:00PM
What are the current teaching methods (IT)?
Teacher is there to help the child through any difficulties. No use of technology.
In this scenario how would the teaching assistant interact with the children?
- Interact with child by pronouncing difficult words
- Save time by listening to another child
- Act out a certain scene from a book
- More accurate speech would help less fortunate children / learning difficulties
- Help children understand grammar in terms of reading
Based on this, how would the children interact with teaching assistant?
- Would find it interesting
- Learned how to improve speech
- Found it a new fun way to learn
- New friend – someone to talk to about bullying
- Less pressure
- Read of the face where the book is played for the child after he has read, so that he can review
HCI Theory & Practice - Scenarios
I came across an interesting description of the theoretical aspects of a scenario, which is a tool, that can be used to describe stories of interaction between human and computer. In Chapter 5 of Human-Computer Interaction (Beale et al, Human-Computer Interaction, 2004), it describes scenarios as being “rich stories of interaction” and being one of the “most flexible and powerful” design representation tools.
Scenarios can be wide ranging in that some can be very short, describing a small situation and some can be large, describing a situation and environment. They can be essentially used in helping the group see what is required when designing the prototype, see how the children will react to the Robot Teaching Assistant etc. and can be reused at any stage of the project.
I think when understanding scenarios and its practicality in the context of our project, we should really focus on the existing environment in which the children work and play in at school. This way we can see how the robot teaching assistant would react or participate in that particular scenario which can aid in our design & prototyping stage at a later date.
However, we can be critical in that scenarios in that they do not highlight potential alternative paths. For example, interactions involved in the real world involve choices and in scenarios it does not necessarily show these potential alternative paths.
Scenarios can be wide ranging in that some can be very short, describing a small situation and some can be large, describing a situation and environment. They can be essentially used in helping the group see what is required when designing the prototype, see how the children will react to the Robot Teaching Assistant etc. and can be reused at any stage of the project.
I think when understanding scenarios and its practicality in the context of our project, we should really focus on the existing environment in which the children work and play in at school. This way we can see how the robot teaching assistant would react or participate in that particular scenario which can aid in our design & prototyping stage at a later date.
However, we can be critical in that scenarios in that they do not highlight potential alternative paths. For example, interactions involved in the real world involve choices and in scenarios it does not necessarily show these potential alternative paths.
Initial Requirements Derived From The Personas
Here is a list of detailed requirements we derived from analysing the persona's (See Deriving User Requirements) : -
Usability
- The robot must be usable by the target audience it is intended (being asked queries)
- Users must be able to use the robot with minimal supervision
- Tasks must take as little time as possible to receive helpful responses from robot to the user
- Must be able talk to the end user and show facial expressions as a human would do
- One of the key assumptions we make is that AI technology has become so advanced to the point that robots can detect human emotion – This can be through a sensor component
- Offer support and assistance to students who request help
- Must be able to access the local school records for timetabling information through a Wireless Fidelity connection
Efficiency (Performance)
- The Robot must be able to handle different queries by different children simultaneously with minimal delay – in a group environment
- Response times should be minimised as much as possible
- The average time for a response must be less than 5 seconds
- It should also be able to deal with a number of queries during school time
Reliability
- The robot should be available 99% of the time during the time the children are at school.
Legislative
- When the teaching assistant attempts to access information held on the local school database, it must be kept confidential.
- The robot shall confirm to the requirements of the Data Protection Act.
Health and safety issues
- Must comply with Isaac Asimov's three laws (See Deriving User Requirements Post). We assume that AI technology has evolved to the point that Robots can comply with these laws.
- The robot must be waterproof and be immune to accidental spillage
Usability
- The robot must be usable by the target audience it is intended (being asked queries)
- Users must be able to use the robot with minimal supervision
- Tasks must take as little time as possible to receive helpful responses from robot to the user
- Must be able talk to the end user and show facial expressions as a human would do
- One of the key assumptions we make is that AI technology has become so advanced to the point that robots can detect human emotion – This can be through a sensor component
- Offer support and assistance to students who request help
- Must be able to access the local school records for timetabling information through a Wireless Fidelity connection
Efficiency (Performance)
- The Robot must be able to handle different queries by different children simultaneously with minimal delay – in a group environment
- Response times should be minimised as much as possible
- The average time for a response must be less than 5 seconds
- It should also be able to deal with a number of queries during school time
Reliability
- The robot should be available 99% of the time during the time the children are at school.
Legislative
- When the teaching assistant attempts to access information held on the local school database, it must be kept confidential.
- The robot shall confirm to the requirements of the Data Protection Act.
Health and safety issues
- Must comply with Isaac Asimov's three laws (See Deriving User Requirements Post). We assume that AI technology has evolved to the point that Robots can comply with these laws.
- The robot must be waterproof and be immune to accidental spillage
Monday, 12 February 2007
Case Study: MIT Kismet
I found an interesting article from MIT which outlined a facial expressions robotic project. The project involved the development of Kismet, Kismet is able to replicate many of the expressions humans can, for example, express joy.
This can be incorporated into the teaching assistant as facial expressions is an important
element.



Source
This can be incorporated into the teaching assistant as facial expressions is an important
element.

Surprise Expression

Joy Expression

Calm Expression
Source
Deriving the requirements from the personas
After analysing the information we gathered from our persona's we were able to generate the requirements for our Robot Teaching Assistant.
Analysis:
It should be able to allow Serena, who has minimal technology exposure, to interact with the Robot Teaching Assistant with least supervision as possible. Serena only uses her computer with her parents so her reaction to the robot may well be a new experience.
Jason and Ben are technology aware, so reliability must be considered as a key requirement, since these users are already quite advanced with technology, they would not want the teaching assistant to have slow responses.
We can argue that Tom falls between both these groups. He has basic computing experience and has some exposure with technology as he enjoys gadgets. He may find it awkward to interact with the Robot Teaching Assistant as he has basic skills within technology disciplines.
Ben’s use of social networks and instant messaging, for instance, MSN Messenger, has resulted in Ben being impatient with technology, which is not very responsive. Furthermore, the need for a responsive teaching assistant is also backed-up by Jason gaming exposure, for example, Jason plays fast paced video games such as FIFA 2007. The responsiveness of the teaching assistant is a critical requirement due to today’s technology centric society. The responsiveness falls into a 2 categories: -
1). Movement
2). Query handling – Group and Individual interaction
Tom is preparing for his SATS (11+) exam and having the teaching assistant available during the break times would offer Tom extra support. The robot must be available at all times during the opening hours to assist with any queries. The role of the teaching assistant is to offer support throughout the day to the actual teacher; hence, the teaching assistant will be available during school hours.
Data Protection
http://www.hants.gov.uk/education/schools/dataprotection/
To comply with the school’s data protection policy, the teaching assistant must follow this policy accordingly whenever accessing school records. Furthermore, when the teaching assistant manipulates the records, the data must be updated with the central school server.
Health & Safety
The Three Laws Of Robotics, formulated by Isaac Asimov in 1942, have these basic principles: -
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
(Reference: http://www.anu.edu.au/people/Roger.Clarke/SOS/Asimov.html,
Date Accessed: 31st Jan 2007)
The teaching assistant must comply with these principles to ensure the well being of the children. This is a major area due to advancement of robotic technology.
This is not a requirement derived from the persona's, however, as it is a legislative requirement.
We can also take into consideration the health and safety of the teaching assistant. Again, this requirement is not necessarily derived from the persona's, but it is necessary that the teaching assistant be water proof to protect itself from rain/accidental spillage etc.
Sensing Emotions / Objects
After analysing the persona's, we have come to the conclusion that the robot teaching assistant must be able to sense human emotion. The persona's all had a list of fears which can affect the child's emotions. Ben, for example, has a particular fear for a teacher called Miss Darcy, whilst Jason has a fear for his next door neighbours cat Molly. These emotions can affect how the teaching assistant should perceive human interaction, so it is of vital importance that sensing is a key requirement.
Local Access with School Database
The teaching assistant should be able to access the school database for information such as school timetabling information. This is of importance, as when analysing, the persona's, each persona had a set structure for the school day and the Teaching Assistant must be able to keep track of lessons etc.
Now that we have derived the requirements from the persona's, a formal set of requirements can now be defined.
Analysis:
It should be able to allow Serena, who has minimal technology exposure, to interact with the Robot Teaching Assistant with least supervision as possible. Serena only uses her computer with her parents so her reaction to the robot may well be a new experience.
Jason and Ben are technology aware, so reliability must be considered as a key requirement, since these users are already quite advanced with technology, they would not want the teaching assistant to have slow responses.
We can argue that Tom falls between both these groups. He has basic computing experience and has some exposure with technology as he enjoys gadgets. He may find it awkward to interact with the Robot Teaching Assistant as he has basic skills within technology disciplines.
Ben’s use of social networks and instant messaging, for instance, MSN Messenger, has resulted in Ben being impatient with technology, which is not very responsive. Furthermore, the need for a responsive teaching assistant is also backed-up by Jason gaming exposure, for example, Jason plays fast paced video games such as FIFA 2007. The responsiveness of the teaching assistant is a critical requirement due to today’s technology centric society. The responsiveness falls into a 2 categories: -
1). Movement
2). Query handling – Group and Individual interaction
Tom is preparing for his SATS (11+) exam and having the teaching assistant available during the break times would offer Tom extra support. The robot must be available at all times during the opening hours to assist with any queries. The role of the teaching assistant is to offer support throughout the day to the actual teacher; hence, the teaching assistant will be available during school hours.
Data Protection
http://www.hants.gov.uk/education/schools/dataprotection/
To comply with the school’s data protection policy, the teaching assistant must follow this policy accordingly whenever accessing school records. Furthermore, when the teaching assistant manipulates the records, the data must be updated with the central school server.
Health & Safety
The Three Laws Of Robotics, formulated by Isaac Asimov in 1942, have these basic principles: -
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
(Reference: http://www.anu.edu.au/people/Roger.Clarke/SOS/Asimov.html,
Date Accessed: 31st Jan 2007)
The teaching assistant must comply with these principles to ensure the well being of the children. This is a major area due to advancement of robotic technology.
This is not a requirement derived from the persona's, however, as it is a legislative requirement.
We can also take into consideration the health and safety of the teaching assistant. Again, this requirement is not necessarily derived from the persona's, but it is necessary that the teaching assistant be water proof to protect itself from rain/accidental spillage etc.
Sensing Emotions / Objects
After analysing the persona's, we have come to the conclusion that the robot teaching assistant must be able to sense human emotion. The persona's all had a list of fears which can affect the child's emotions. Ben, for example, has a particular fear for a teacher called Miss Darcy, whilst Jason has a fear for his next door neighbours cat Molly. These emotions can affect how the teaching assistant should perceive human interaction, so it is of vital importance that sensing is a key requirement.
Local Access with School Database
The teaching assistant should be able to access the school database for information such as school timetabling information. This is of importance, as when analysing, the persona's, each persona had a set structure for the school day and the Teaching Assistant must be able to keep track of lessons etc.
Now that we have derived the requirements from the persona's, a formal set of requirements can now be defined.
The appearance dilemma – human or android?
There are two possible appearances that can be adopted, a human and android appearance.
Human appearance
The human appearance is in terms of a female or male teacher. As the target audience is under the age of 11 the children are currently in primary/junior school. Statistics have shown that the number of female teachers in primary schools is significant in relation to male teachers. For example, the guardian stated in 2005 that 15.7% of primary school teachers were male and that 47% of children aged 5 to 11 have no contact with male teachers [1]. Taking this into account it can be argued that the teaching assistant should adopt a female appearance to “blend” into the environment. Although, the guardian also stated that 25% of parents questioned were concerned about their children not having enough interaction with male primary teachers.
Android appearance
The android appearance will result in a unisex appearance. The advantage of an android appearance is that the children will be attracted to the teaching assistant, hence stimulate the children. However, it can also be argued that the children may lose concentration and may see the teaching assistance as a toy.
Both appearances were discussed and the group decided that the female appearance was the most suitable based upon a number of factors:
The majority of junior/primary school teachers are female
The teaching assistant will not be able to replicate 100% human behaviour and taking into account that 47% of children aged 5 to 11 have no contact with male teachers the children [1] may develop a certain attitude toward males
A android appearance will result in the children losing concentration and regarding the teaching assistant as a toy
Female Humanoid Requirements
- Black glasses
- Brown eyes
- Black formal jacket and trousers
- Blue top
- Silicon skin
- Black shoes
After a visit to the school the appearance requirements were derived from observations of the current teachers and the children's behaviour towards them. Furthermore the persona's were asked “who is you favourite teacher?” which aided the process. For example, Serena answered Miss Dhillion. The favourite teachers was prioritized in the analysis and common trends were identified, for example, we concluded that the teachers that wore black clothing received this highest attention from children.
[1] Source
Human appearance
The human appearance is in terms of a female or male teacher. As the target audience is under the age of 11 the children are currently in primary/junior school. Statistics have shown that the number of female teachers in primary schools is significant in relation to male teachers. For example, the guardian stated in 2005 that 15.7% of primary school teachers were male and that 47% of children aged 5 to 11 have no contact with male teachers [1]. Taking this into account it can be argued that the teaching assistant should adopt a female appearance to “blend” into the environment. Although, the guardian also stated that 25% of parents questioned were concerned about their children not having enough interaction with male primary teachers.
Android appearance
The android appearance will result in a unisex appearance. The advantage of an android appearance is that the children will be attracted to the teaching assistant, hence stimulate the children. However, it can also be argued that the children may lose concentration and may see the teaching assistance as a toy.
Both appearances were discussed and the group decided that the female appearance was the most suitable based upon a number of factors:
The majority of junior/primary school teachers are female
The teaching assistant will not be able to replicate 100% human behaviour and taking into account that 47% of children aged 5 to 11 have no contact with male teachers the children [1] may develop a certain attitude toward males
A android appearance will result in the children losing concentration and regarding the teaching assistant as a toy
Female Humanoid Requirements
- Black glasses
- Brown eyes
- Black formal jacket and trousers
- Blue top
- Silicon skin
- Black shoes
After a visit to the school the appearance requirements were derived from observations of the current teachers and the children's behaviour towards them. Furthermore the persona's were asked “who is you favourite teacher?” which aided the process. For example, Serena answered Miss Dhillion. The favourite teachers was prioritized in the analysis and common trends were identified, for example, we concluded that the teachers that wore black clothing received this highest attention from children.
[1] Source
Analysing the Market
We are assuming that in 10-15 years AI and robotics would have evolved to offer the functionality required for the teaching assistant.
To our knowledge there is not a fully functional robot teaching assistant available in today's market, however there are robots that can offer some of the functionality, for example, the Honda robot Asimo. This robot offers different functionality to what we are suggesting., for example, Asimo offers no speech functionality, hence could not be considered as a teaching assistant.
After researching into alternative teaching assistants a number of tools were discovered with the majority being on-line. However these tools offer very limited functionality in comparison to the robot teaching assistant.
The screen-shot below demonstrate a basic teaching tool that we have researched:

The tool above is typical of many software teaching tools that can be regarded as offering very limited functionality and not comparable to the robot teaching assistant. To conclude the robot assistant can be regarded as a revolutionary teaching assistant offering the next generation of teaching assistant technology.
Source:
To our knowledge there is not a fully functional robot teaching assistant available in today's market, however there are robots that can offer some of the functionality, for example, the Honda robot Asimo. This robot offers different functionality to what we are suggesting., for example, Asimo offers no speech functionality, hence could not be considered as a teaching assistant.
After researching into alternative teaching assistants a number of tools were discovered with the majority being on-line. However these tools offer very limited functionality in comparison to the robot teaching assistant.
The screen-shot below demonstrate a basic teaching tool that we have researched:

The tool above is typical of many software teaching tools that can be regarded as offering very limited functionality and not comparable to the robot teaching assistant. To conclude the robot assistant can be regarded as a revolutionary teaching assistant offering the next generation of teaching assistant technology.
Source:
Final Idea
We have chosen the Robot Teaching Assistant as our final idea.
Most of our ideas were educationally based and the teaching assistant seems to be the most interactive and innovative.
The technologies associated with the manufacturing of such systems are available in today's world, for example, Honda's ASIMO robot and Osaka University's Actroid humanoid robot.
Most of our ideas were educationally based and the teaching assistant seems to be the most interactive and innovative.
The technologies associated with the manufacturing of such systems are available in today's world, for example, Honda's ASIMO robot and Osaka University's Actroid humanoid robot.
Sunday, 11 February 2007
Persona
Name: Serena Sondhi
Age: 8
Overview of Serena's Family
A day in the life of Serena
School Day: -
School Activities: -
Household and leisure activities: -
Goals and Fears: -
Goals: -
Computer Skills, Knowledge and Abilities: -
Demographic Attributes: -
Technology: -
Communicating: -
Age: 8
Overview of Serena's Family
- Older brother aged 23
- Runs his own business
- Older sister aged 20
- Model
- Father aged 52
- Movie film producer
- Mother aged 51
- Manages family property portfolio
A day in the life of Serena
School Day: -
- Wakes up at 7am -> Gets dressed for school -> Eats breakfast prepared by family chef -> Collects homemade packed lunch -> Escorted to school -> School -> Home -> Television -> Friend comes round -> Homework -> Family Dinner -> Bed at 9:30am
Weekend: -
- Wakes up at 9am -> Eats breakfast prepared by family chef -> Watches cartoons -> Gets dressed -> Goes with mother to shopping -> Home -> Plays with family in the garden -> Television -> Family Dinner -> Bed at 10:15am
School Activities: -
- Dropped off in the morning by her mother and picked up after school
- Enjoys School and has many friends, extremely popular
- Enthusiastic about learning Ancient History – favourite topic is the Egyptians
Household and leisure activities: -
- Enjoys playing dolls houses with her friends
- Plays chess with friends (sometimes herself)
- Plays her violin
- Enjoys time spent with her older sister who she looks up to as a role model
Goals and Fears: -
Goals: -
- Becomes as successful as her older sister
- Get into the school orchestra
- Not seeing her Father during the week due to work
- Her older sister and brother leaving home
Computer Skills, Knowledge and Abilities: -
- Very computer-savvy for her age
- Does all her homework on the computer under parents supervision
- Does not use the internet – parents do not allow it
Demographic Attributes: -
- Wealthy upper class family
- Rich suburbia – Large properties with acres of land
Technology: -
- Has a Personal Computer in her own bedroom but only uses it with parents to do homework
Communicating: -
- Has many school friends
- School reports show her to by shy in class, but does well at school with good grades
- Is part of a karate club
- Enjoys spending time with her family at home
Persona

Name: Ben Manvir
Age: 9
Overview
- Sister aged 17
- Currently looking for employment
- Mother aged 40
- Part time receptionist at local Law firm
- Farther aged 41
- Full time bus driver
- School Day
- Wake up 6.30 -> Internet (miniclips.com) -> school > home-> Tea -> Internet (bebo.com, hi5.com, MSM Messenger) -> Play station -> Dinner -> School work (If parents can persuade him) -> Bed at 9.30
- Weekend
- Wake up 10.00 -> Football with Farther at local club -> Tea -> Sky -> Internet (See above) -> Sometimes goes to next door neighbours house-> Dinner -> Bed at 10.00
- During school breaks and dinner time plays football with friends
- Does not pay much attention to teacher
- Thinks that subjects like Geography and History are a waste of time
- Main interest is computer games (Wrestling, FIFA, Gears of War)
- Plays football with farther and next door neighbour
- Is a member of many social networks (bobo.com, hi5.com etc…)
- Goals
- Not sure, but would like a job that involved playing games!
- Fears
- Homework
- Teacher Miss Darcy
- Parents will take away his gaming consoles if he doesn't try harder at school
Computer Skills, Knowledge and Abilities
- Very knowledgeable about the Internet
- Able to understand new technologies fairy quickly
- When he does do his homework he uses the Internet
- Working class family
- Inner city borough
- Has varies gaming consoles, PC and laptop
- Activities dominated by gaming
- Constantly pushing parents for new technology, for example, new games
- Has limited number of friends
- Spends more time on the Internet and playing games
- Joined the local cricket club but never attended
- School report emphasised a lack of communication skills
Saturday, 10 February 2007
Personas

Overview
Name: Janet Smith
Age: 38
Occupation: Teacher at primary school
Status: Married and has a child
Husband: Tim Smith, 39, psychologist
Child: John Ward, 10, goes to school
A Day in the Life
Monday - Friday:
9am-5.00pm Teaching and other duties at school
Evenings: Marking papers and homework, preparing for the next school day
Weekends: Marking papers and homework, preparing for the next weeks school days, spending time with the family. Meet up with old friends and colleagues. Watching TV and reading articles on-line.
School Activities
- From 9am to 3.30pm he teaches.
- 3.30pm to 5pm attends teachers' meetings, etc. and when she is free at this time marks her pupils' homework.
- Sometimes she finds it difficult to put up with kids' unwillingness to pay attention to her classes.
- She finds marking homework time consuming.
Household and leisure activities
- She is a member of a local bowling team.
- Always ties to run away from housework.
- Spends lots of time at the weekend on the on the computer reading articles.
- Wants to be the headmaster of the school.
- She fears losing the control over her classes as sometimes she finds it difficult to get the kids attention.
Computer skills, knowledge and Abilities
- Has basics skills of using computers and uses them often.
- Very good at science subjects.
Technology Attitudes
She considers computers as a useful tool and wants to learn to use them more.
Communicating
she has many friends and loves to socialize with people.
International Considerations
- She goes with her family to different counties like Spain, Portugal and Canada on holiday.
- She loves travelling and knowing about other cultures.
Friday, 9 February 2007
Personas

Overview
- Name: Tom Green
- Age: 9
- Tom is disabled, having lost the use of his legs in a car accident.
Parents:- Mother is a nurse.
- Father owns a small construction firm.
- Mother is a nurse.
- Tom has an older brother (Edward) aged 12.
Mon – Fri:
- School is from 9:00 – 3:30. Evenings spent playing on his computer console, doing homework and watching TV.
- Enjoys seeing friends on a Saturday, and usually spends Sunday with his family.
School Activities
- Tom is building up to his exams and therefore spending more time studying.
- He is a member of the chess club at school.
Household and Leisure Activities
- Tom enjoys playing computer games and seeing friends.
Goals, Fears, and Aspirations
- Tom would like to work in a museum when he is older.
Computer Skills, Knowledge, and Abilities
- Tom has learnt basic computer skills through his ICT lessons at school.
- Tom is very good at maths and science but struggles with English.
- He is very interested in history.
Demographic Attributes
- Tom’s parents have a good combined salary.
- They live together in a pleasant village in the country.
Technology Attitudes
- Tom likes computers and gadgets.
Communicating
- Tom gets on well with people and has many friends.
- He enjoys socialising with his brother too.
International Considerations
- Tom has been to Spain once with his family, but is just as happy staying home.

{kind=link}
{kind=link}
{kind=link}
{kind=link}